


Integrating Subwoofers with Stereo Mains using Audiolense
 In this article, I walk through the steps of using Audiolense to create a digital crossover and time align dual subs with stereo mains. In addition, showing how to smooth the frequency response and reduce group delay at the listening position.
In this article, I walk through the steps of using Audiolense to create a digital crossover and time align dual subs with stereo mains. In addition, showing how to smooth the frequency response and reduce group delay at the listening position.
This results in a smooth frequency response (12 Hz to 22 kHz ±3dB on my system) with all direct sound arriving at my ears at the same time. The phase response and group delay is mostly flat at the listening position.
In addition, I walk through a time domain experiment designing two correction filters with the same frequency response, but one with time domain correction and one without. I discuss the audible differences through listening sessions.
Why subs for music?
In Audiolense Digital Loudspeaker and Room Correction Software Walkthrough, I was able to smooth the frequency response of my JBL cinema loudspeakers, time align the drivers, and achieve relatively flat phase and group delay at the listening position. I am happy with the results, but something is missing…
My JBL speakers have solid output to 40 Hz and can extend in room response close to 30 Hz. Great high efficiency kick and punch, but missing a bit of weight on the bottom octave. I listen to rock, blues, and alternative music, most of which does not have deep bass (bass guitar low E is 41 Hz), so if I added subs, would I notice?
Enter Rythmik Audio. A company that has been around for many years with a good engineering and “no-hype” reputation. Being a tech geek, I was intrigued by their direct servo technology and the most extensive FAQ I have seen from any sub manufacturer. Most importantly for me, one of the few sub manufactures that publish their own measurements and validated by 3rd party testers.
I purchased two F12 entry level music subs direct from Rythmik. They arrived in a timely fashion and extremely well packed – thick cardboard box, within another thick cardboard box, with the sub floating in high density foam. Could drop off the end of the truck with no damage. Very nice.
Sub Setup
Much has been written about setting up subs in numerous configurations. One can even use room simulation software to determine best placement. However, since we are using DSP, try whatever sub setup and configuration you wish. If your ears (and measurements) disagree with the sound, then some fine tuning of placement may be required. However, using this advanced DSP, it is likely the measured results and listening experience will be more than acceptable.
It is generally accepted for frequencies below 80 Hz, it becomes difficult to determine a sound's location. If you click on the link, you can try it in on your own system. As an ex-recording/mixing engineer, I can say for the recordings and mixes I worked on, low frequencies below 100 Hz, whether from bass guitar, drums, piano or synthesizer, were always in the center of the mix and never panned. This seems to be the case for most music, except from the 60’s and other recordings where it is intended as an effect.
So, why “stereo” subs? I wanted more sub output, without having to buy a bigger sub. Whether it is one or multiple subs, it is important to be able to individually control the frequency and timing response of each sub with respect to the mains. This is the key takeaway from the article. In my case, I have control over the frequency and timing response of all drivers in the system.
Setup:

Is this the best location for my subs (i.e. between the JBL’s and electronics)? Probably not. It is more about convenience than anything else. Once measured and listened to, they sounded good no matter where I am in the room. However, I am mostly interested in how they sound across my three seat listening area.
Sub configuration:

I am letting Audiolense take control of adjusting delay/phase and XO duties for the best possible integration with the rest of the drivers. I level matched the subs to the mains with the volume control.
Configuring Audiolense
See my intro article to Audiolense for basic configuration and operation, as most of this article will focus on the differences, so as not to duplicate content.
I have taken my existing stereo two way biamp (XO at 630 Hz) speaker setup, and turned it into a three way triamp setup, crossing the subs at 40 Hz:
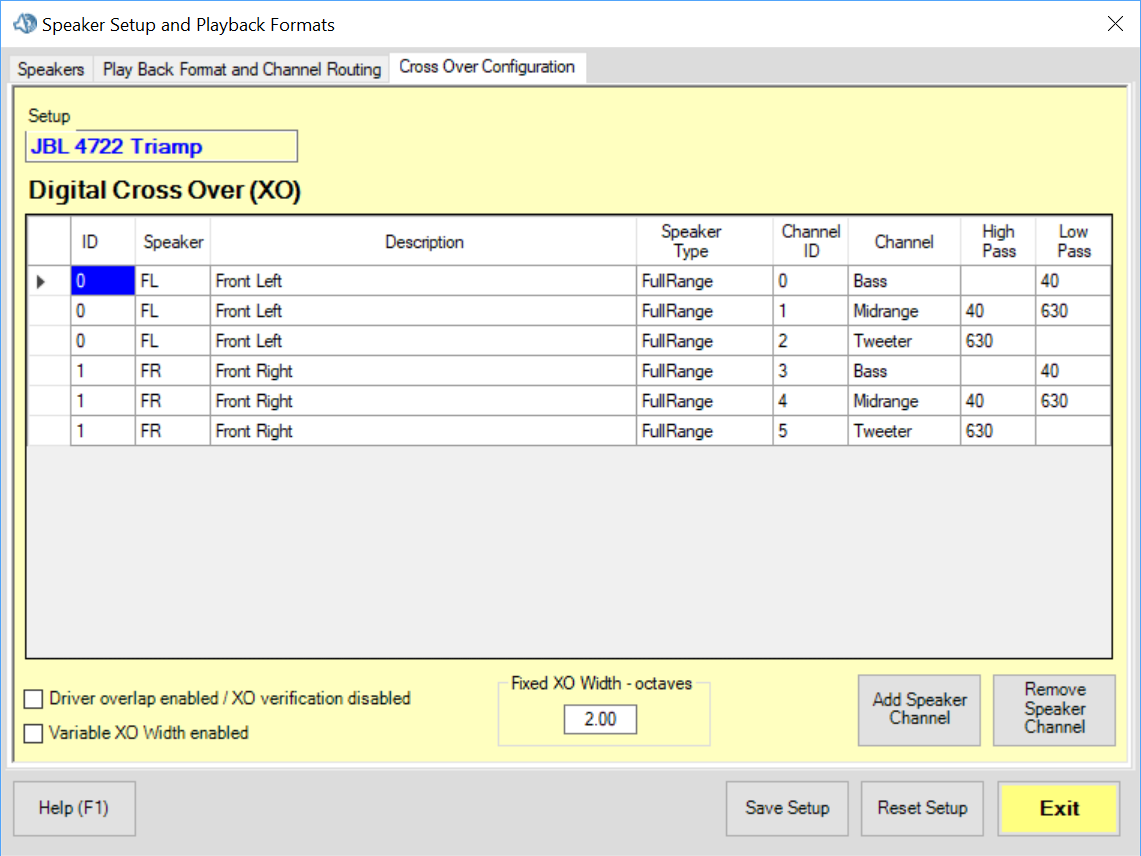
Why did I choose 40 Hz as the sub XO corner frequency? The JBL cabs with 2 x 15” drivers each, have solid bass output to 40 Hz, as will be seen in the measurements. I like the high efficiency punch and slam, but looking to supplement the bottom octave to give it the full weight.
The source material I listen to does not have much output below 40 Hz (we will see about that), which allows me to get away with smaller subs, as the JBL cabs take the majority of the bass signal. As it turns out, even with 525 watts @ 4 ohms into dual 15”woofers per side, the music beat can trigger the limiters first before the subs run out of gas (at 300 watts per sub). This is at concert level of ~105 dB SPL continuous output at the listening positon with peaks above that. That’s just for short term fun, as hearing impairment begins at around 5 minutes at this continuous SPL, even though it sounds perfectly clean.
Most of my critical listening is performed at reference level, i.e. the magic of 83 dB SPL. For lower levels, I calibrate using JRiver’s dynamic loudness control, which provides a more natural sounding volume control based on the frequency response characteristics of human hearing.
The main Audiolense screen shows the newly designed digital XO:

In my previous Audiolense article, there is more about XO choices, steep slopes, etc. Bernt has a really good section on XO choices in the help file. Also, Rod Elliott’s article on, “Phase, Time and Distortion in Loudspeakers” has a good read on crossover filters.
Taking Measurements
The detailed steps of setting up and taking measurements are covered in my previous walkthrough. Here, I am simply taking the measurement:
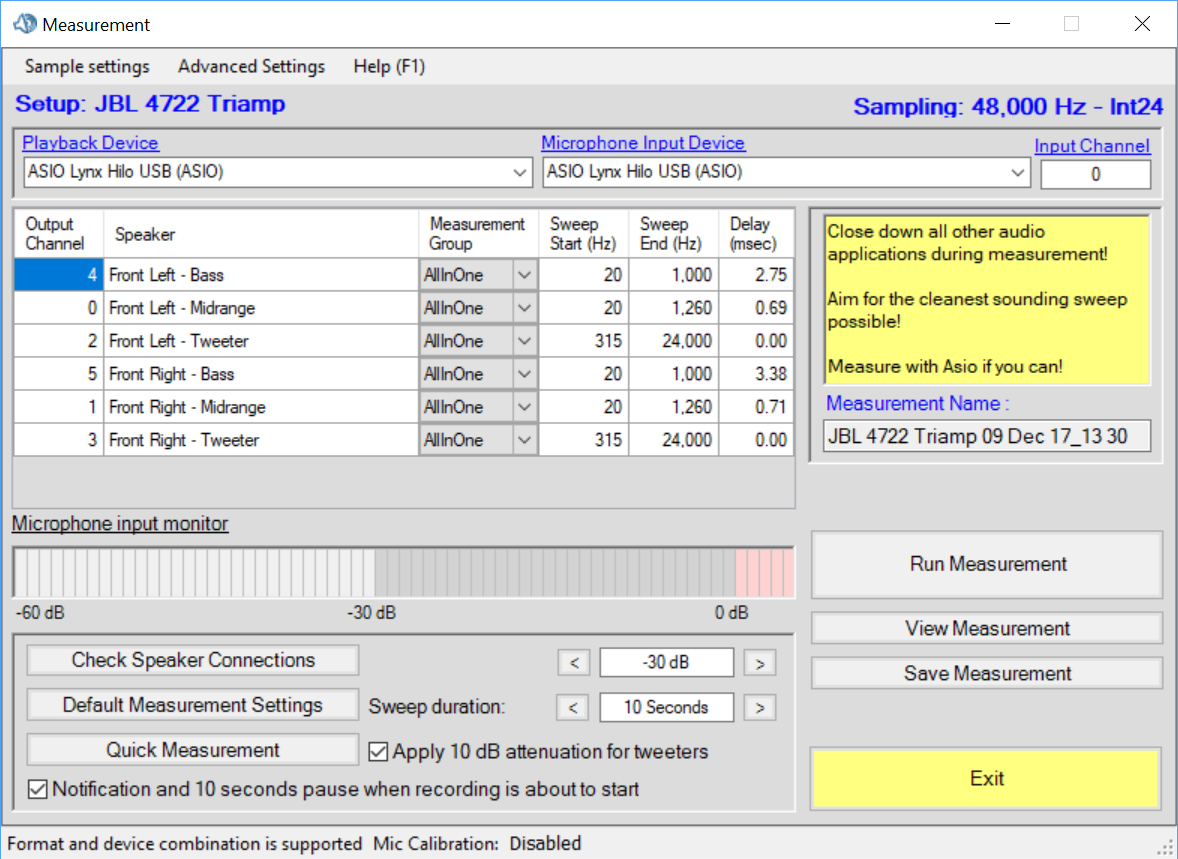
A few things to note. See how the channel outputs are matched to which speaker. It is likely that you will need to enable Output Channel Override from the Advanced Settings menu. While I have a triamp config, a passive stereo mains with added sub(s) (i.e. biamp config), will require one or more additional DAC output channels, one per sub.
Note the frequency sweep ranges for each of the channels. Keep this in mind when looking at the frequency response charts, relative to the crossover slopes. When a correction filter is made, the speaker’s raw response is convolved with the corresponding digital cross over slope. In the case of linear phase crossovers, which these are, the advantage is that all direct sound frequencies arrive at the same time to the listener’s ears, in phase.
Check the time delay in the last column. This measurement has already been taken and these are the resultant delays between drivers, relative to the tweeter. If you look back at my previous article, you will see the same delay values for the midrange channels. While the subs appear to be in the horizontal plane, I did tape measure them, one can see the measured delays for each channel are different, which is why we want independent time domain control for each sub.
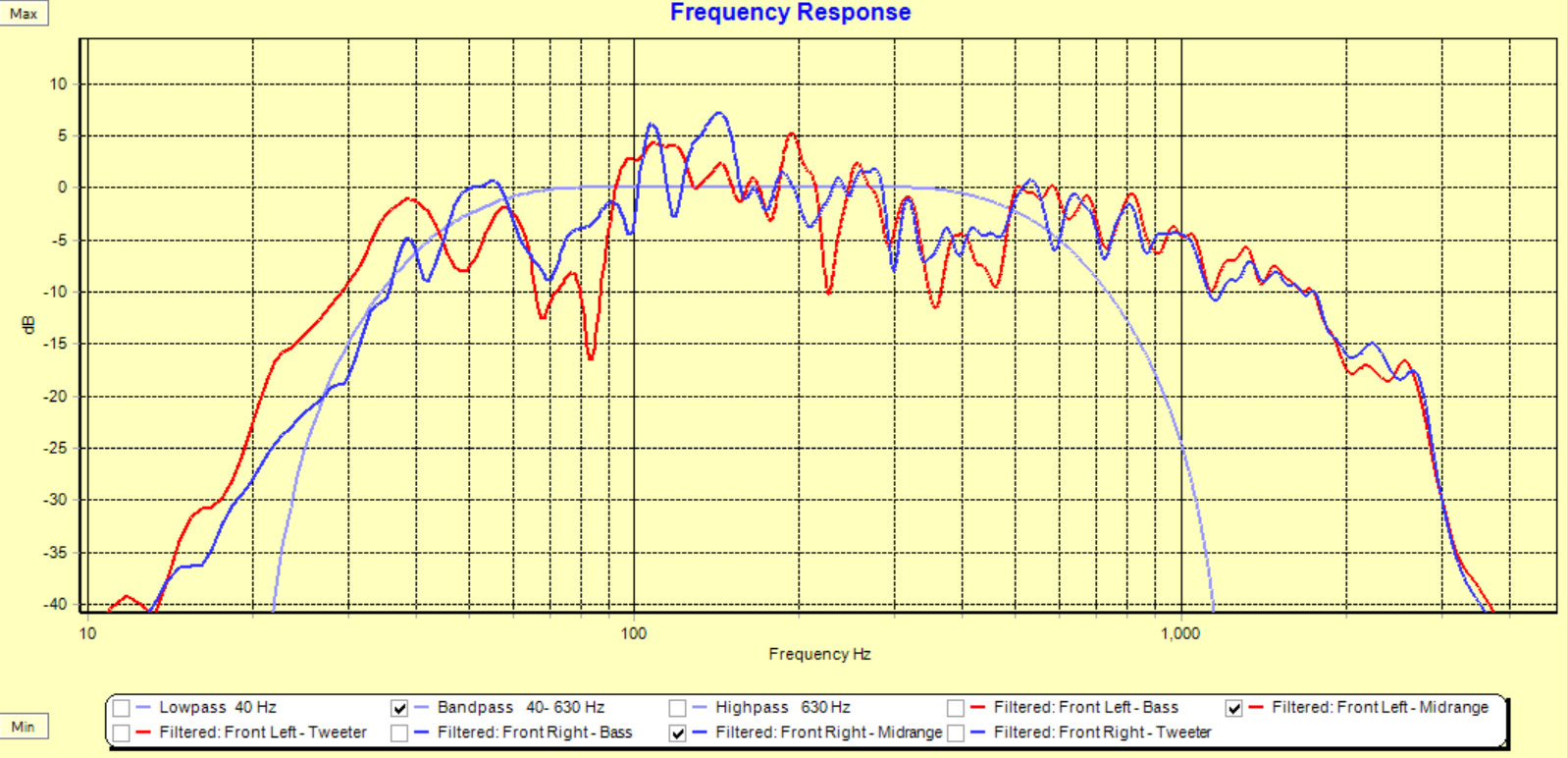
Below is the Audiolense filtered frequency response that better represents what we hear versus the raw, unfiltered measurement. I used a custom filter procedure with True Time Domain (TTD) correction turned on, as well as TTD per driver and selective preringing turned on. See the Audiolense help manual or my previous article for details for designing your own custom filter procedure:
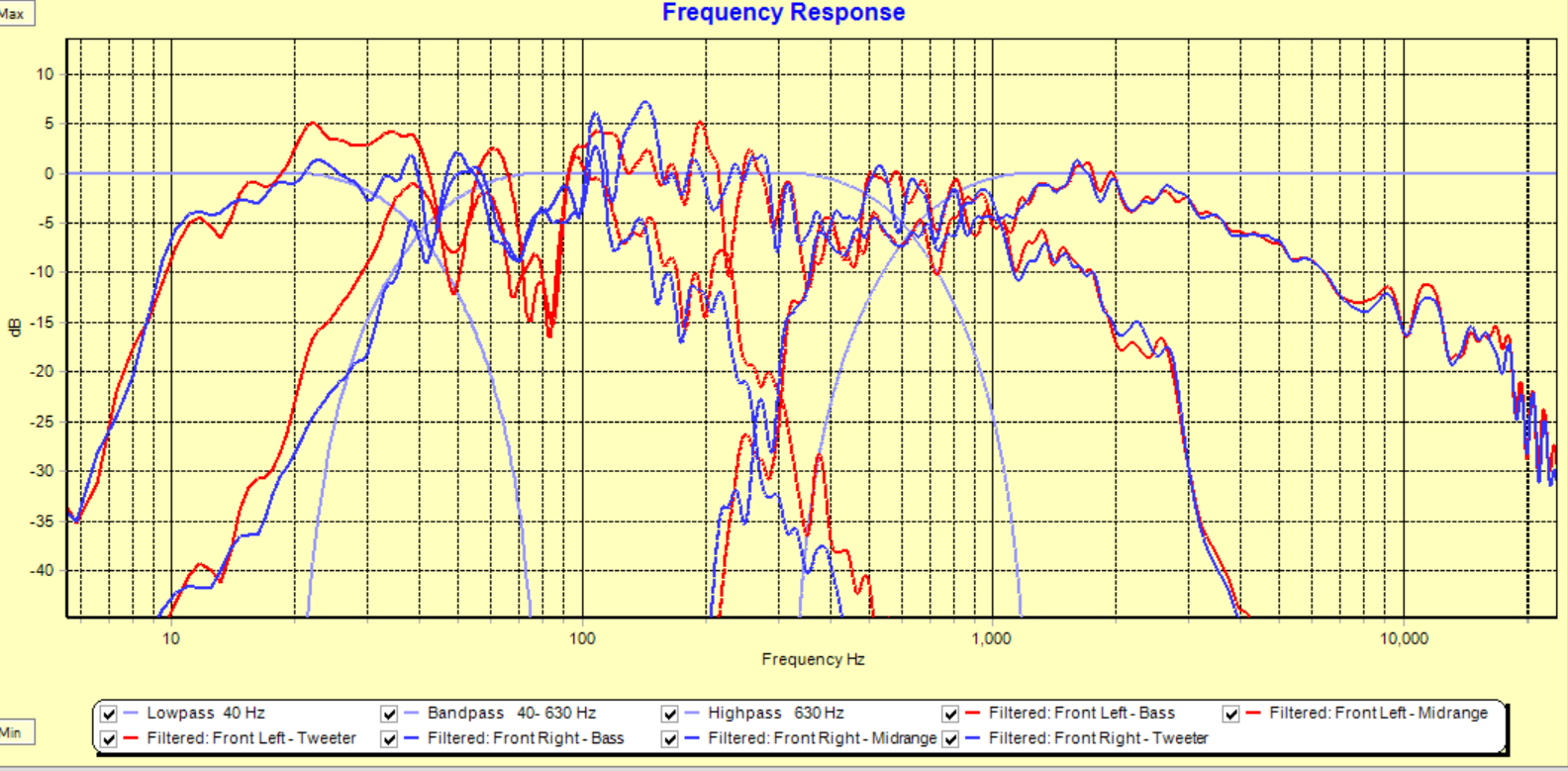
I left the crossover slopes in so one could see how the each driver’s response would be convolved with their corresponding digital XO filter. Meaning, with the corner frequencies chosen, and steep XO slopes, each driver is working well within their normal operating range. Therefore, the acoustics slopes of the driver become the linear phase digital crossover slopes, and sum perfectly both in the frequency and time domain.
Let’s focus in on the subs (Rythmik L12) response. Here I zoomed in on the horizontal frequency scale and left the 40 Hz low pass XO displayed so one can see how the subs measured response will be convolved with the XO. I.e. the acoustical slope will become the digital XO slope after 40 Hz:
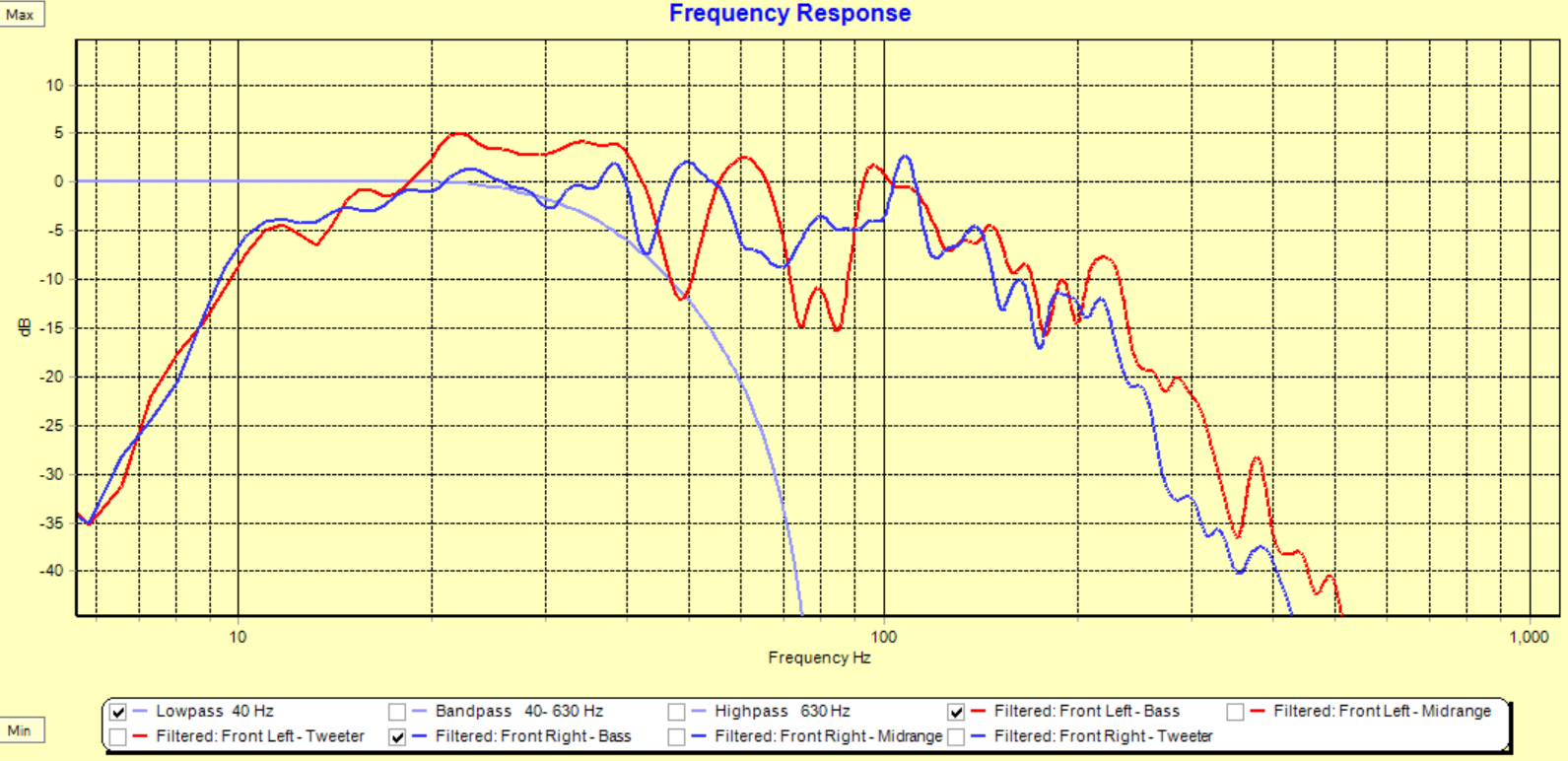
In my room, solid response down to 12 Hz (-3 dB). After 40 Hz, starting to see real room effects and then by 110 Hz, smoothing out and rolling off. Resembles the measured spec from Rythmik.
Now let’s look at the bandpass (JBL 2 x 15” ported cabs):
Good response to 40 Hz, which is the tuning frequency of the JBL vented cabs. Note in both the subs and bass measured responses, the left side of my system has nulls around 70Hz and 90 Hz and for the right speaker, non-minimum phase response at 110 Hz, 120 Hz and 140 Hz. In part, because my stereo is set up off center of the room so the left speaker is more in the corner and the right speaker positioned at the middle of the long wall. We will see Audiolense do its room correction job in these areas so both the timing and frequency response arriving at ones ears matches, even though the stereo is offset to one side of the room.
40 Hz looks to be a good XO point, again within the normal operating range of the woofers. Folks may choose a higher XO point if using bookshelf speakers. Same goes for 630 Hz XO point, well within the normal operating range of the compression driver. Let’s turn our attention towards the measured time domain (i.e. step response).
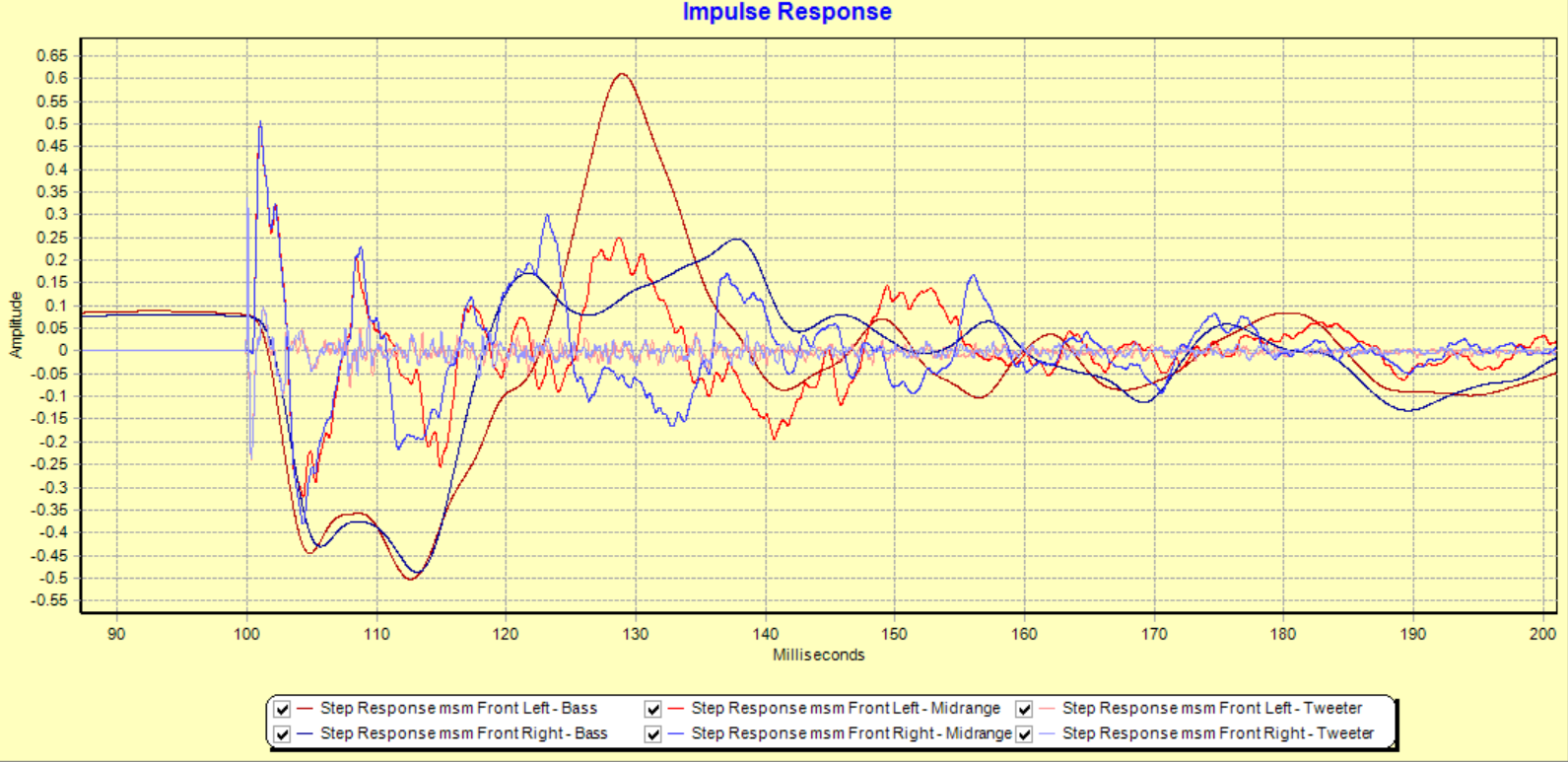
In the Audiolense main form, select Impulse Response from the Chart View radio button group. Then from the Audiolense Analysis menu, select Measurement, then select Step Response:

I have labelled the timing diagram to help identify which driver goes with which peak. We are looking at the direct sound plus the next 20 milliseconds of sound arrival at the microphone at the listening position. The first arrival at the listening position are the tweeters with positive polarity (i.e. the compression driver and waveguide). Second arrival is the bass and lower mids (i.e. the double 15” cabs) at .69 (left) and .71 (right) milliseconds later, again with positive polarity. Finally the subs arriving 2.75 (left) and 3.38 (right) milliseconds later after the tweeter, with negative polarity. The delay values are from the measurement window shown earlier. Note that Audiolense assigns 100 ms on the horizontal scale as the start of arrival of the sound. In our relative terms 100 ms = 0 ms.
That’s approximately 3 milliseconds of delay for the subs, even though they are in approximately the same physical horizontal plane as the double 15” cabs. If we were to visualize that, sound travels ~1 foot per millisecond and would be as if the subs were physically placed 3 feet behind the mains from their current location.

Certainly relative to the tweeter peak, the subs are delayed and have long wavelengths. Now let’s expand the horizontal scale to see 40 ms (i.e. ~ over 40 feet of sound travel in the room).

Whoa! The left subwoofer has a huge reflection which shows up as an amplitude peak at 28 milliseconds (i.e. 128 ms on the chart). Its magnitude is bigger than the direct sound, which means it is maximum phase peak at 28 ms. Let’s look at 100 ms of sound travel to see if there are any other room issues:
The tweeters spike is just a sliver compared to the subs peaks. No other major issues after 100 ms of sound travel. That’s quite the peak at 28 ms. Something to ponder. Let’s see what Audiolense can do about that.
The other aspect of long sub wavelengths is where is the peak located? The peak can occupy several samples with the same amplitude values… and even peak higher later in time, as we see in the example above. Because we are using linear phase digital XO’s, the peak is half of the filter length in number of taps. In the case of our 65,536 tap filters, the peak would occur at sample position 37,268 – i.e. the peak of the waveform. For a minimum phase XO, the peak would occur at sample position zero, which would be the start of the rise of the waveform. Audiolense will automatically calculate and align the peaks of each of the drivers and ensuring all drivers are positive polarity.
As a side note, there are several techniques and software tools available to measure the time alignment of drivers in a loudspeaker system. As mentioned above, it gets tricky in sub territory due the long wavelengths involved, especially with an XO of 40 Hz. I have tried most of the tools and techniques available. I must say that Audiolense has exhibited the best accuracy with a high degree of precision that is both predictable and repeatable for time alignment. I demonstrate that here with two sets of measurements taken months apart and can replicate the exact time alignment with the woofers and tweeters (see previous article). The fact that the process is automated is a real time saver. Manually time aligning drivers requires many steps and is prone to carbon unit failure.
Finally, time alignment is not just for one mic location either. There are not enough pages here, but in my book I show time alignment of a three way triamped system maintains perfect time alignment after moving the measurement microphone to 14 different locations, covering a 6 foot by 2 foot grid area at the listening position. Basically the area of a 3 seat couch, whether sitting upright or back into the couch. Same goes for phase and group delay, virtually flat over the same listening area.
Let’s see what Audiolense can do with this “typical” mess.
Designing a Custom Filter
Correction Procedure Designer (CPD):
As mentioned above, this is the same procedure as described in the Audiolense intro article and not going to repeat here. Rather, let me share some tips. It is worth the time to read Bernt’s help file on what each of the CPD controls do, as it makes a big impact on the sound quality.
Essentially one is defining how much correction both in the frequency (i.e. dB of correction applied) and time (over how long in milliseconds) domains, using a user defined frequency dependent window and psychoacoustic filtering that best represents what our ears/brain hear. This offers considerably more flexibility that any other type of eq, plus time domain correction is being applied. Not only time aligning drivers, but correcting for room reflections. There is an example of that in the Audiolense intro article where the group delay in the bass frequencies were greatly reduced.
As shown in the above step response measurement, the left sub has a huge amplitude peak at 28 milliseconds that is greater in amplitude (i.e. maximum phase) than the direct sound. We will see Audiolense correct for that.
It may take a few filter procedure iterations, similar to narrowing down the target response process, as described next, where one is happy with the sound quality. I encourage experimentation to try several graduated settings, generate/save filters and while listening to music, switch filters in real time and listen/compare. The workflow is fast, only taking a minute or two to cycle through it.
Target Design:
Let’s start with a quick tutorial on preferred target frequency responses. I have covered some of this in the Audiolense intro article and my series on measuring loudspeakers. In this article, I am going with Sean Olive’s and Floyd Toole’s research on The Subjective and Objective Evaluation of Room Correction Products and The Measurement and Calibration of Sound Reproducing Systems respectively.
From Sean’s slide deck, is a preferred ranking of average magnitude responses, measured at the primary listening position:
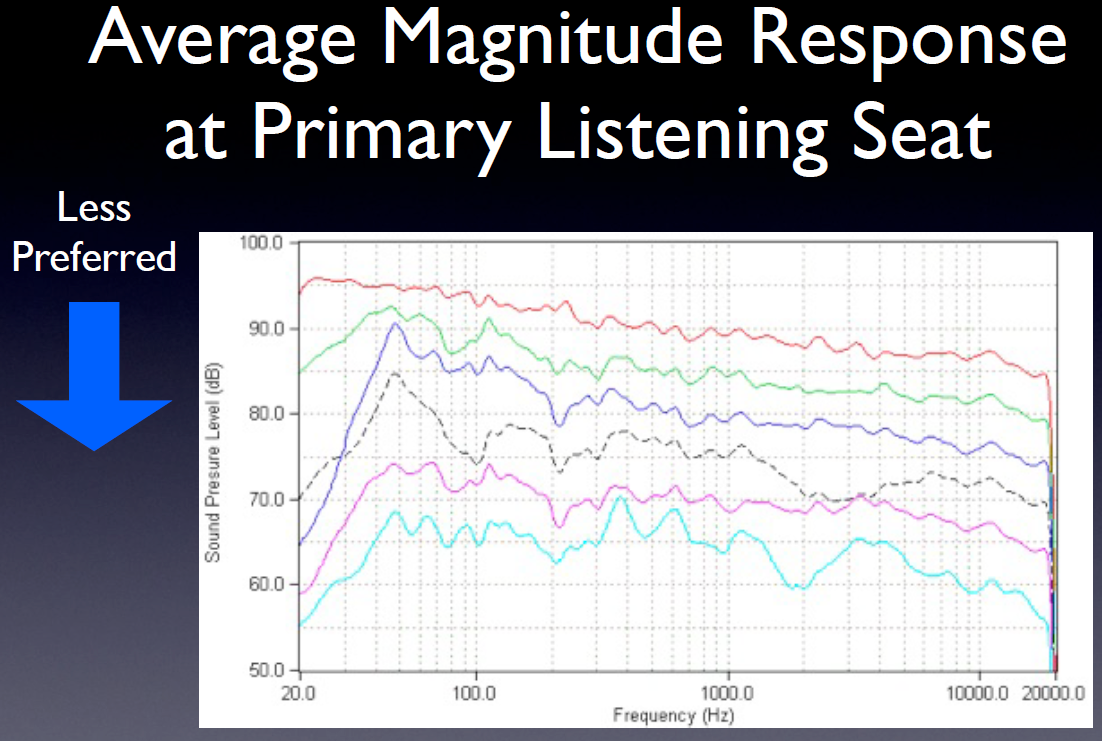
The top preference (red trace) is a flat, but tilted measured response. If 0 dB is 20 Hz, then it would be a straight line to -10 dB at 20 kHz.
Note that this tilted measured response is perceived by our ear/brain as subjectively flat or a neutral response according to Sean’s research:
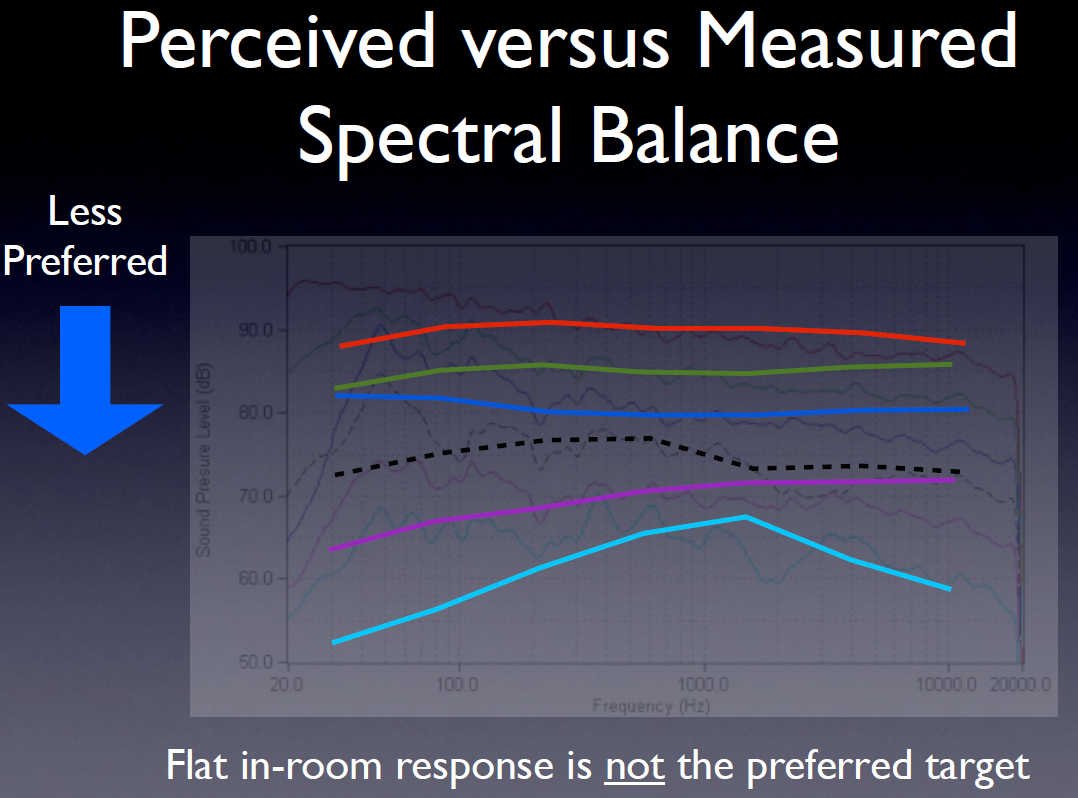
A measured flat in-room frequency response is not the preferred target. See how an objectively measured response of 20 Hz and straight line to -10 dB at 20 kHz is subjectively perceived as a neutral or flat response to our ears/brain (red trace overlaid in the above chart). Reading the articles linked above and JJ’s research on Acoustic and Psychoacoustic Issues in Room Correction (See PowerPoint presentation) explains further.
Armed with that knowledge, I designed a similar target response in Audiolense’s Target Designer:

0 dB = 20 Hz and a straight line to 24 kHz, so it is -10 dB down at 20 kHz. A good place to start and one can fine tune to taste by moving the 24 kHz red marker up or down in one or two dB increments at a time and listen.
I use a “bracket” method by first making one target sounding too dull and the other too bright. Might take a few tries to establish this. Then between the two targets, I move the 24 kHz maker up or down, in 1 dB increments, generate and save the filter. Using JRiver’s Convolution engine, as an example, I open the file dialog and select a FIR filter while the music is playing. There is less than a second gap of silence as the filter is switched. It is fairly easy to hear the spectral differences between filters using 1 dB increments.
One can cycle through the process fairly quickly and in no time, be narrowing it down to a couple of candidates. Once you are down to two candidates, this takes a bit more time, as you cycle through more music, switching back and forth a number of times listening to more and more tunes. But after a couple listening sessions over a few days, one will emerge as your top preference. Whether your preference is for a neutral tone, or whatever your preference is, you can narrow it down quickly using this method.
As a side note, and not directly related to our subwoofer discussion, a loudspeakers directivity index and measured off axis frequency response is an important consideration when using DSP. The JBL 4722’s I use have a tight, but constant or controlled directivity polar pattern. It responds well to on-axis eq, as off-axis response is virtually identical, due to the constant or controlled directivity design of the waveguide used for this speaker. The Harman/JBL “spinorama” chart for my loudspeaker shows good constant directivity from about 400 Hz on up. With these speakers toed in an equilateral triangle of 10 feet, is just enough distance to illuminate the entire couch area with full range frequency response.
Note these constant directivity waveguides require high frequency compensation by design. No audible issues were heard with the HF compensation engaged and the measured HF distortion is well within the capability of the JBL Pro 4” large format compression driver.
One can also see that the target design follows the natural roll off of the subs in the room. This is best practice.
It is worth spending the time on target design. For best accuracy, one has to zoom right in on the red marker (i.e. dot) to line it up exactly at what frequency and dB setting you want. I mean zoom way in. It will take multiple zooms by clicking down and dragging the mouse from top left diagonally to bottom right and releasing. And vice versa to zoom back out.
Final guidance relative to custom filter procedure design and target design. Pick one and optimize first. Only adjust one variable at a time in order to train ones ears to know what to listen for. Personally, I optimize the spectral timbre (i.e. frequency response) first. In other words, the target design. For me it is about getting that neutral sound. Pick a target response, like the Olive and Toole one referenced above, use it and if you don’t like it, then fine tune to your preference. With the recommended bracket procedure, it won’t take long to zero in on what you prefer.
If you look in my book or search online, there are several recording/mixing production guidelines, well known monitoring procedures and industry specs that one does try to attain as a professional in the industry. I spent 10 years in the recording/mixing chair and the “sound” is ingrained in my mind, as I heard each recording and mixes hundreds of times and on many systems outside the control room before committing to final mix for mastering. When your number one goal is to have the music “sound good” on a wide range of playback devices and environment’s, the pros try and mix and master on neutral speakers in a neutral environment (i.e. a control room acoustically designed to a specification). So whatever is artistically rendered, translates the intent as best as possible across a wide spectrum of sound reproduction systems.
While there is quite a bit of variability in the sound quality of recordings, mixes and masters, I find that the vast majority of recordings sound good across my system, including the mixes I made in the recording studio. I should know how they are supposed to sound, as I was there and mixed it! All meaning to say that one target response does work well for the vast majority of recordings I have. For example, all of these tunes sound great on my system. Rolling Stones Top 500.
It is not so much about the variability of sound quality that I object to. It is the excessive dynamic range compression that is crushing the ever living beat out of the music, is what I object to most.
Filter Generation and Simulated Output
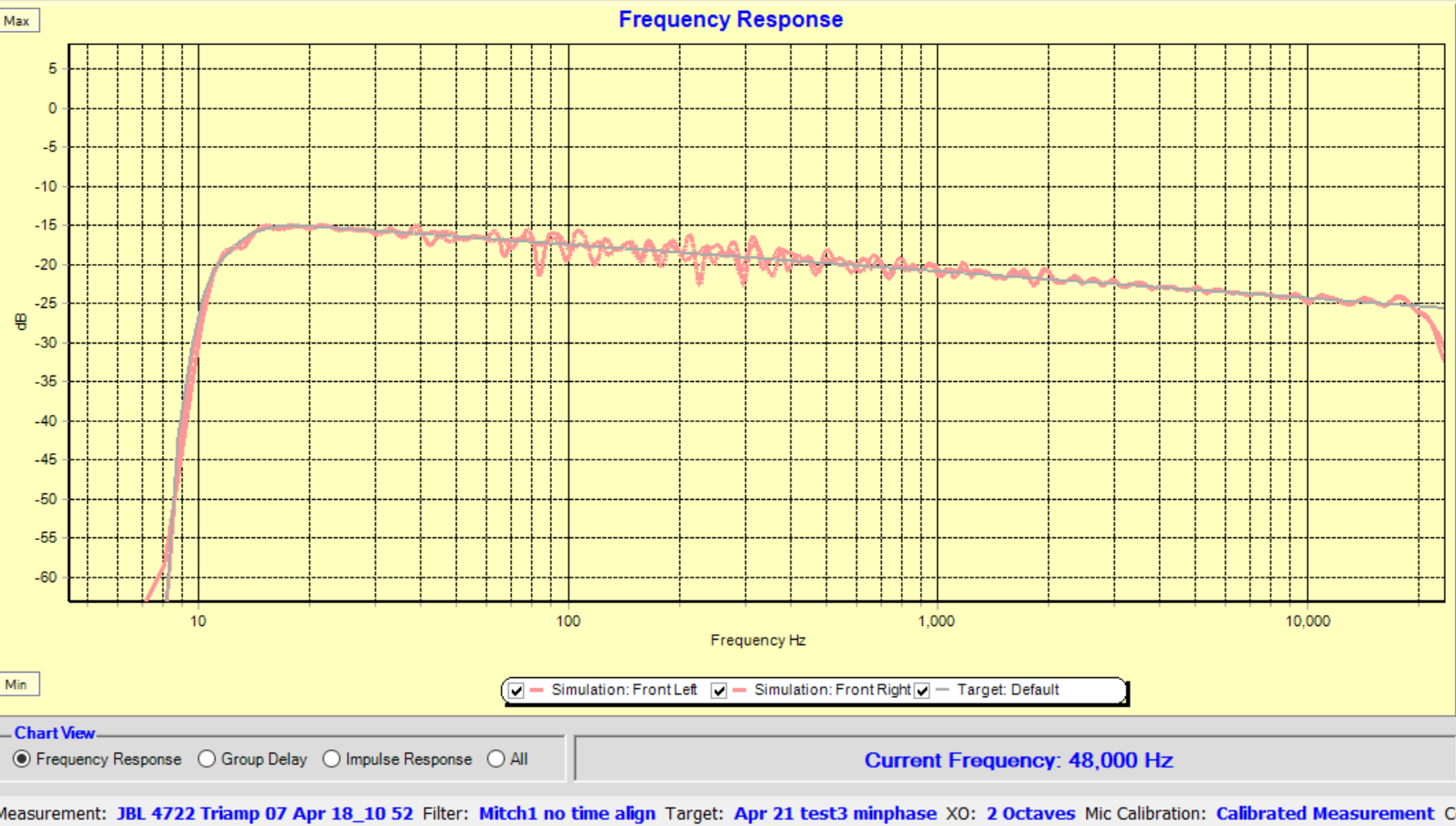
Let’s look at the simulated frequency response, with the target:

The -3 dB points are 12 Hz and 22 kHz, and within ±3 dB variance across the frequency range, plus a tighter tolerance than that through most of the range. It did take a number of iterations of CPD tuning and listening to achieve this result. Just like in the intro article, Audiolense’s simulation is virtually identical to the measured response, using a 3rd party acoustic measurement software like REW, for example.
Not let’s look at the timing (step) response. Here is the simulated step response plus target over 100 milliseconds:
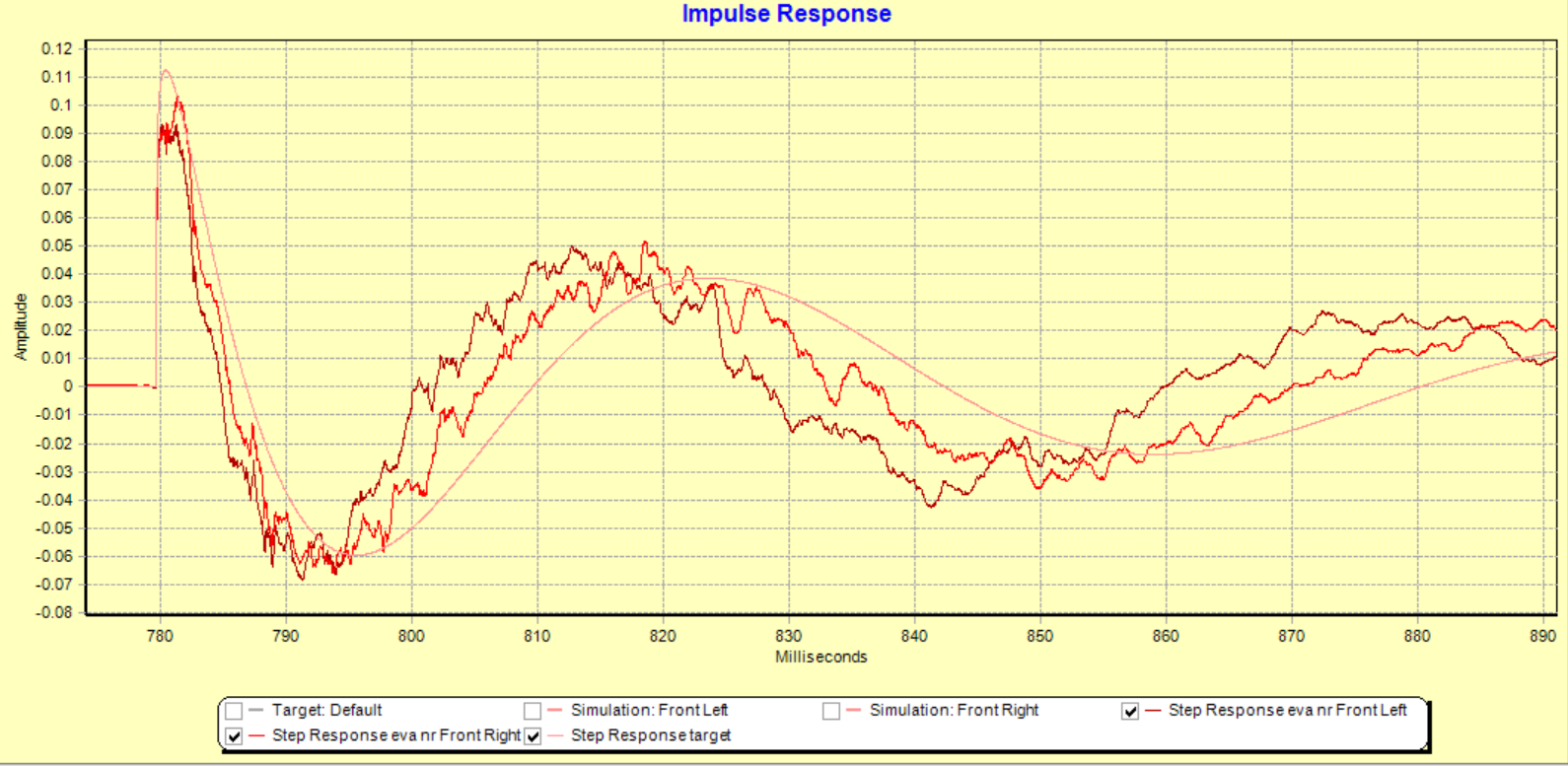
Virtually text book timing response closely following the target. No preringing, perfectly time aligned, (that’s the vertical step showing no discontinuities) and the elimination of the maximum phase peak. Pretty much as good as it gets, for my speakers in my living room.
Let’s zoom the horizontal scale to show the first 40 ms of sound arrival:
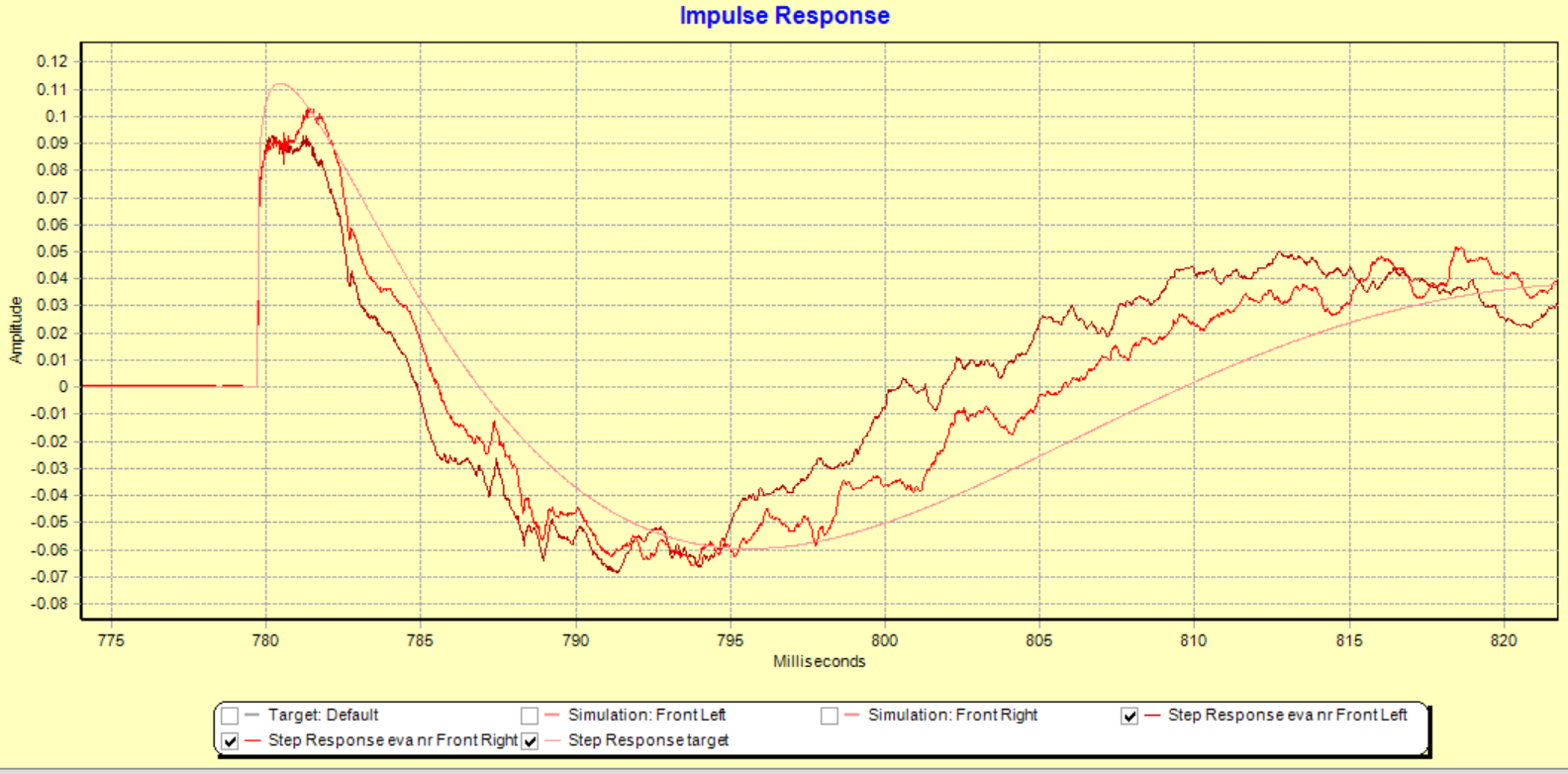
A note on reading the chart, consider the 780 millisecond start of the step as reference = 0 milliseconds. Meaning the signal has reached the microphone at the listening position or our ears for that matter. This shows that all frequencies are arriving all at once (i.e. time aligned). Further, that nasty maximum phase peak at 28 milliseconds is gone and overall, the response follows close enough to the target for rock and roll ☺
A Time Domain Experiment
An experiment I performed is AB’ing two different FIR correction filters, one with time domain correction and one without, but both having the same frequency response. The exact same target and correction procedures were used, except for TTD correction is not enabled, nor is TTD per driver, but all other settings remain exactly the same. This effectively turns the time domain correction off, but has the same frequency correction (i.e. tonal response), so when switching between FIR correction filters in real time while listening to music, one can start to tune into the difference it makes when a system is time domain corrected, versus one that is not, especially with subs. Why? Subs introduce milliseconds of delay and even at low frequencies, we can still hear the overhang or lag in the bottom end.
Here we go, a new filter procedure, same as the previous filter procedure, but with time domain correction turned off, same target and all other settings identical. Here is the result:
As one can see, the frequency response is virtually identical to the same frequency response with the time domain correction. Check. Now let’s switch to the time domain and look at the step response over 100 milliseconds:
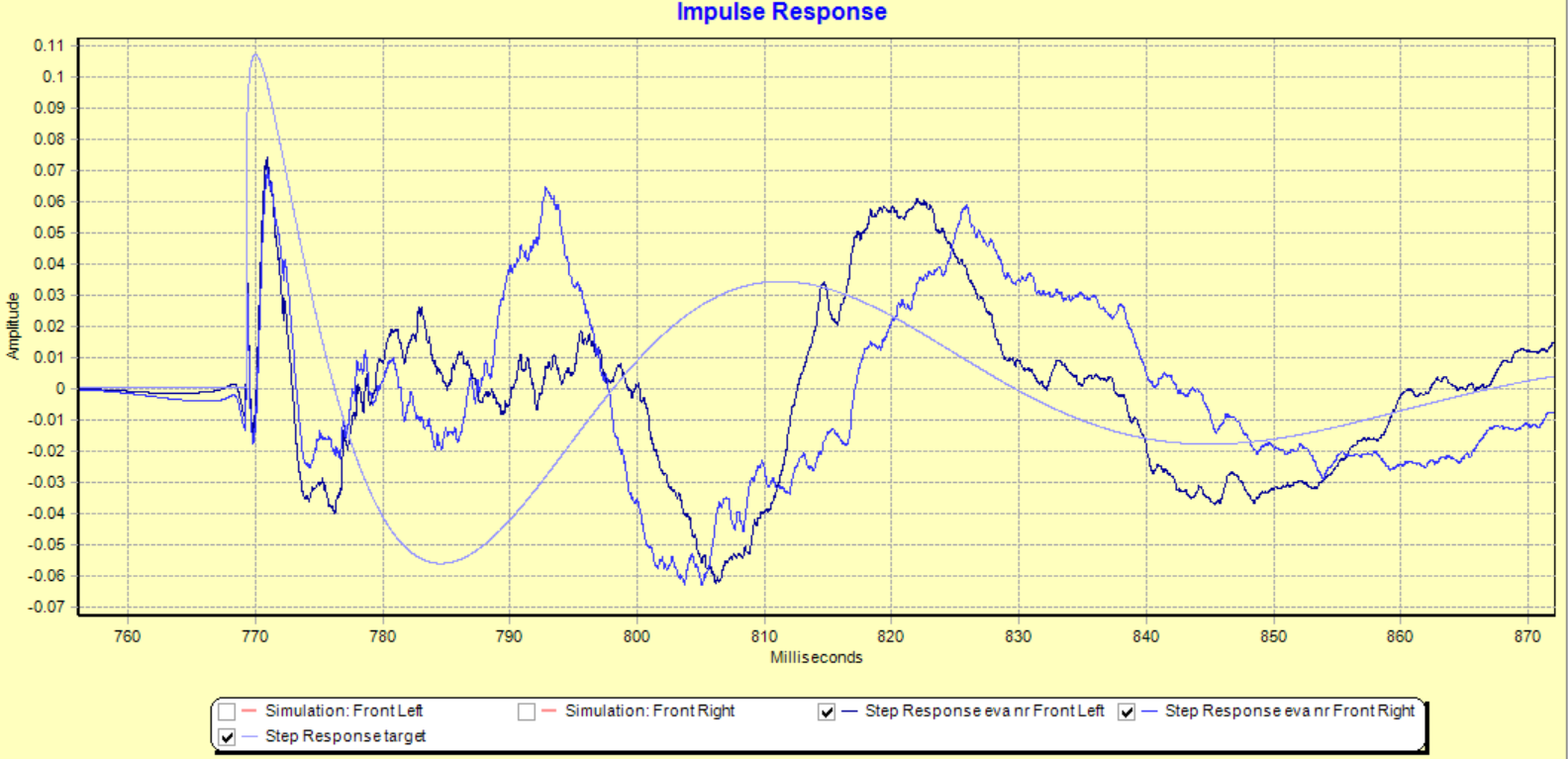
Does not track at all to the same target. Look back at the step response with the time domain correction turned on. Quite a difference. Let’s break it down a bit. I zoomed the horizontal scale to 60 milliseconds so we can see the time domain issues better:

Just like the measured step response at the beginning of the article of the non-time aligned speakers, here in our modeled simulation, we can see the tweeter arriving first, bass cabs second, and the subs some 3 milliseconds later, with a negative going waveform. Of course, the reflection from the left sub is still there, higher in amplitude than the tweeter, but not quite the same height as the woofers from original measurement. Why? Well, we have applied frequency correction, so there is going to be some effect on the timing, but as can be seen, not much compared to the original measurement. This is a great example of how one can’t fix time domain issues with eq. Not only does the timing response resemble nothing like the overall target, but also can’t fix the high frequencies arriving at my ears before anything else and the subs arriving late.
Given that the two frequency responses are identical, but the timing responses are not, means that Audiolense can adjust the timing response independently of frequency response. This is exactly what happens when Audiolense True Time Domain (TTD) is turned on. All drivers are time aligned and the timing response tracks closely to the target response while taming room reflection issues like that maximum phase peak in this article and reducing group delay at low frequencies as demonstrated in my previous Audiolense article.
The question… is any of this audible?
Personally, under blind conditions with my lovely assistant switching filters, I can distinguish between the two every time, even though it does take some concentration. It is not a night and day difference, but rather subtle. For me there are two audible tells. One is that more often than not, the tweeter or high frequencies are the first to arrive. This, to my ears, produces a more forward sound, being a bright brighter in tone, even though the frequency response is the same. That’s because the tweeter is almost always physically closer to ones ears than the other drivers. No amount of “eq” can fix the tweeter arriving first. Second, one can hear the lag on the other drivers, especially the subwoofer. It does take a while to tune into what is happening when switching between filters, but when you hear it, it is hard to forget about it.
In addition, this may be what people perceive/confuse as “slow” bass, meaning bass overhang or simply the sub is still outputting, or not begun to output sound, even though the transient has passed and the mains have stopped outputting sound. It is easier to tell with transient material like drums that have a good high frequency cue and low frequency content, like a kick drum for example. Can you hear the click first and then the boom? Or does it sound integrated?
Given the sophistication and power of today’s audio DSP software, I am hoping that the industry revisits the time domain of speakers in rooms, as it seems to me to be the missing half of what constitutes accurate sound reproduction. If the goal is to accurately reproduce the waveform of what is stored on the digital media to ones ears, then there can be no frequency or time domain distortions added to the waveform.
Just like in my previous article where I show the flat frequency, phase response and group delay of my Lynx Hilo converter, I should be measuring the same as the sound arrives at my ears. This ensures, whatever is stored on the digital media is reproduced as close to as possible to my ears with little frequency or time domain distortion. However, there are a few major transfer functions along the way that really mess with frequency and timing responses – mainly non-time aligned speakers of all types, in wildly variable room acoustics of all shapes and sizes.
This is where Audiolense comes into play as one can design a custom, high resolution digital FIR filter that contains the mathematical convolution of your specific speakers in your listening environment. This custom filter is designed to restore the music signal back to what is actually on the digital media, or as close as possible, again, specifically designed for your speakers in your room.
It helps if your speakers are time aligned with constant directivity characteristics. It helps if the speakers have been designed and engineered using science like Harman’s spinorama system for example.
Lots of controversy over whether to correct frequencies above Schroeder or 500 Hz as an upper limit. In my case, I am trading a more ragged frequency response for having high efficiency (or dynamic speakers). These speakers respond well to eq as verified by the measurements below. If my speakers were Salon2’s for example, they would have a smoother response beyond 500 Hz and may require no eq at all, but they are at least 10 dB less efficient than the JBL’s. Audiolense’s partial correction can be set for any frequency and independently controlled in both the frequency and time domains.
Verification Measurements:
As mentioned in my previous article, Audiolense simulations are virtually identical to real world measurements using a 3rd party acoustic measurement software like REW. While there is some variability based on smoothing algorithms used, my book shows in detail that these sophisticated DSP packages produce simulations that are virtually identical to their corresponding measurements. I can also overlay exactly what the subs contribute versus just the JBL cabs.
Frequency response:

-3dB points are at 12 Hz and 21 kHz and within a ±3 dB tolerance of the target design and better than that over most of the range.
Step response:

All direct sound arriving at the same time and well behaved over 100 milliseconds of sound travel in the room. That nasty peak at 28 ms is gone.
Group Delay:
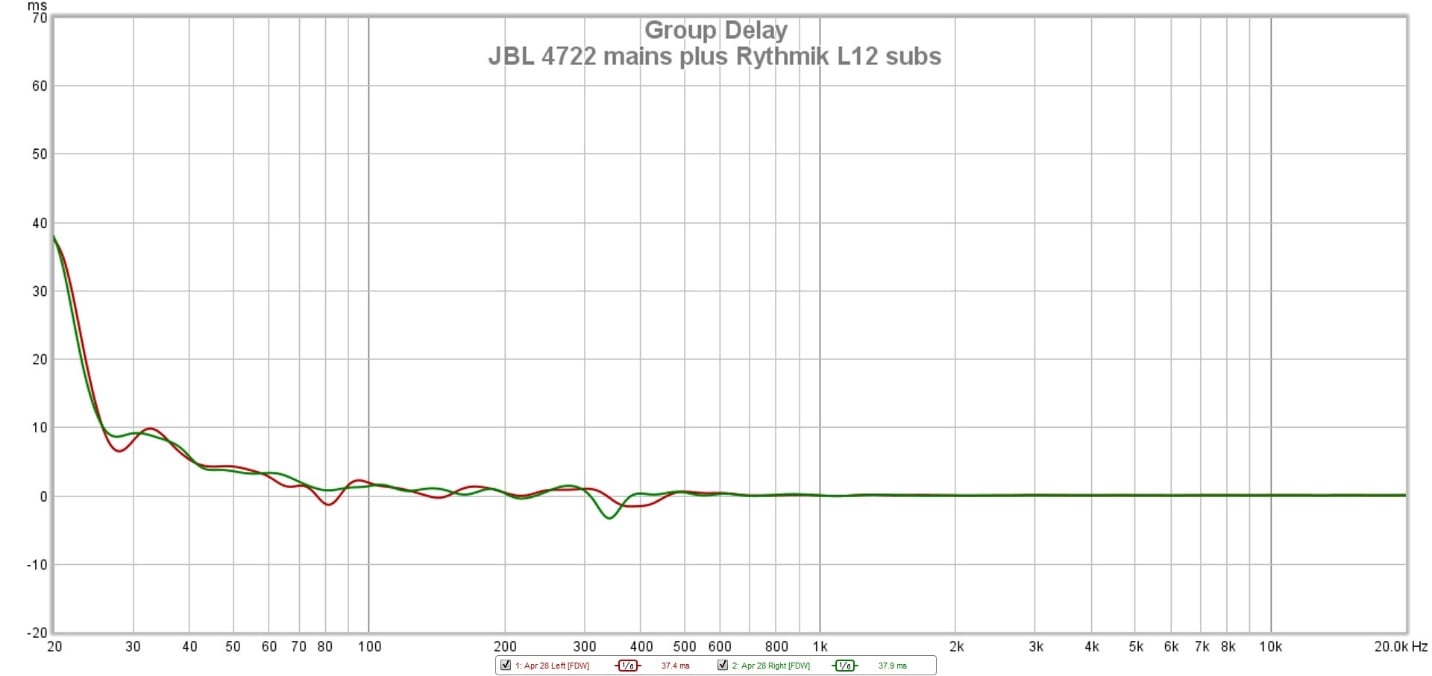
Mostly flat with natural rising delay at the very bottom of the response. A little ripple at 350 Hz.
Phase:

Again mostly flat with natural rising phase in the low end. Here we can see a bit of ripple a 350 Hz. Again unlikely it is audible, but I will investigate.
This Bruel & Kjaer application note on, Loudspeaker phase measurements transient response and audible quality, provides some insight for folks interested in this topic. The one limitation that is overcome with modern DSP software is the ability extract the minimum phase response, correct that, while independently correcting the excess phase response.
What is interesting is that not only the frequency and timing responses match well between channels, but so does the phase response and group delay. All of which are responsible for a speaker’s ability to completely “disappear”. All one is left with is the stereo illusion presented in 3D with a rock solid stereo phantom center image.
The most telling improvement is not only showing that the subs integrate seamlessly, both in the frequency and time domain, but how much the subs contribute to extending the bottom end of my JBL 4722’s:
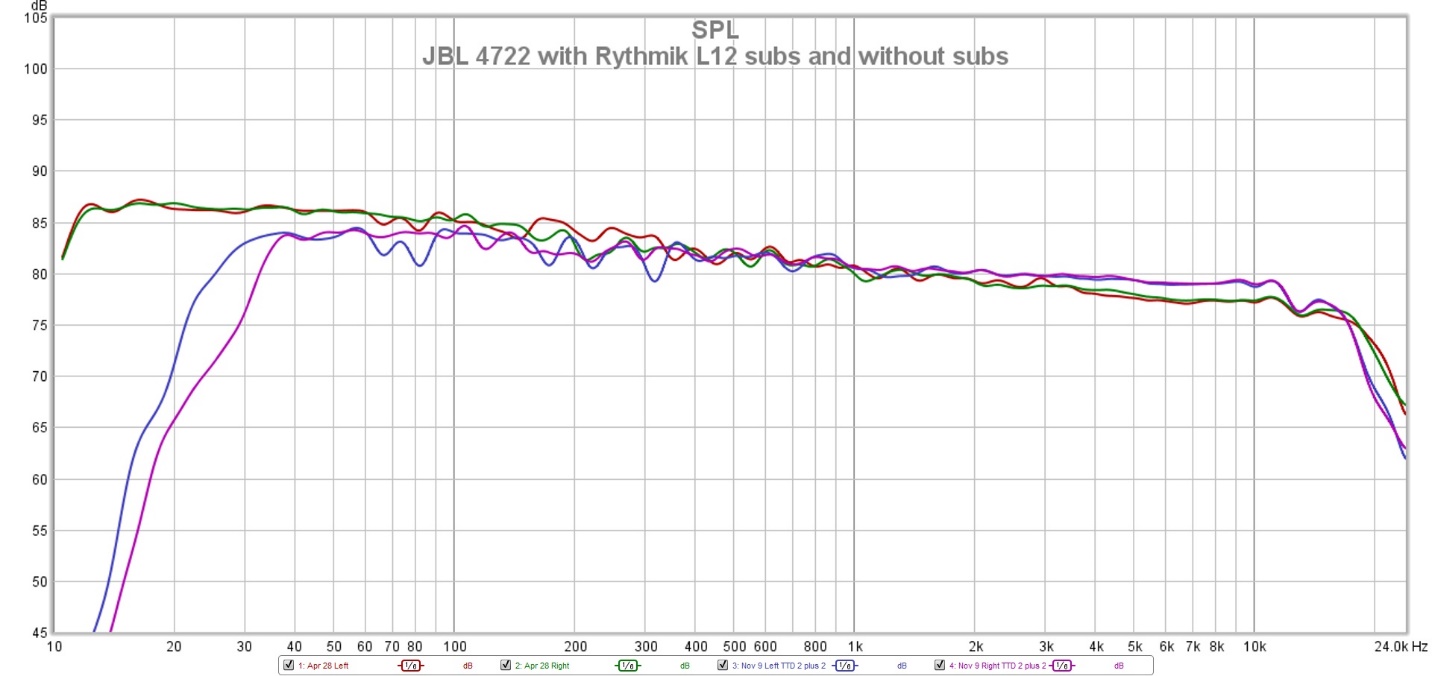
The red and green traces are with the subs integrated. The blue and purple traces are without subs as measured in the previous article. I used the “bracket” method to determine my target preference for each setup. Even over a span of several months’ between measurements, and target designs, I arrived at virtually the same tonal response, except for the bottom end extension. This was starting with blank target designs in each case. It is interesting to me that I consistently end up with the same tonal response. I know what I prefer ☺
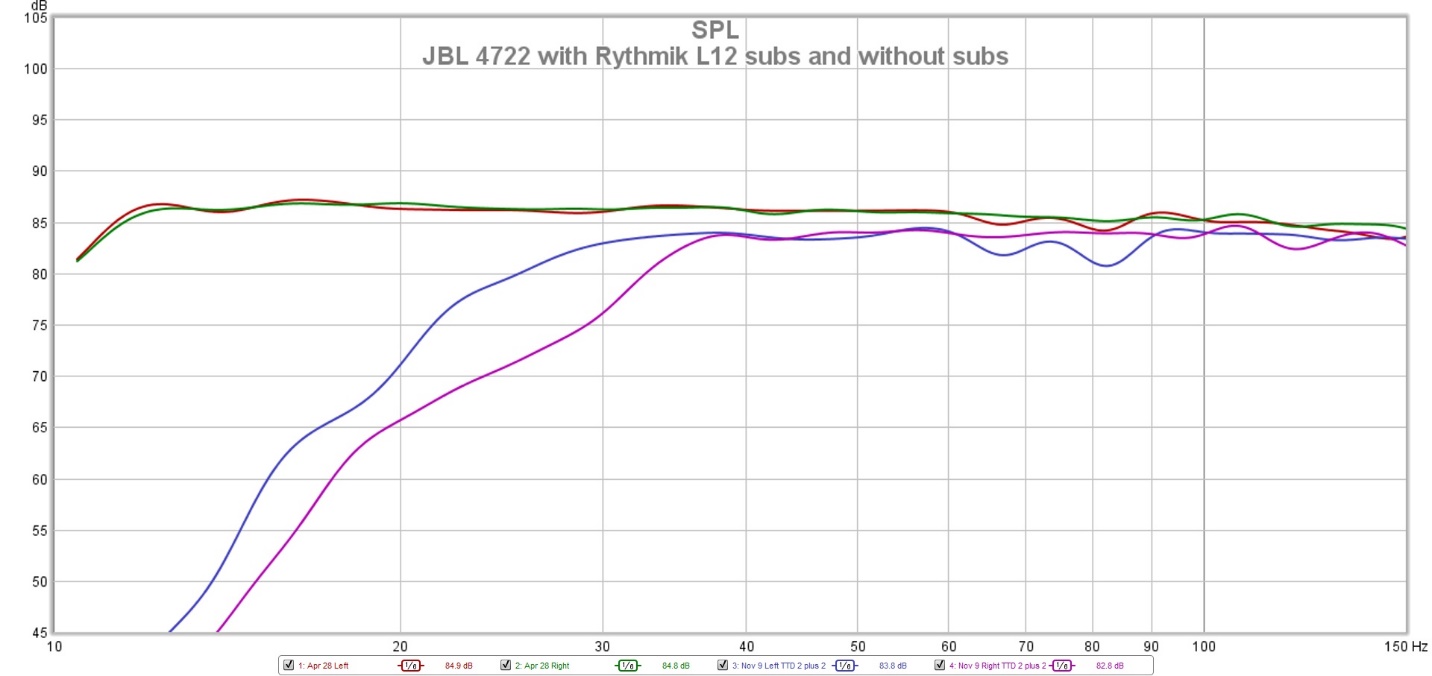
Finally, a zoomed in scale from 10 Hz to 150 Hz showing the difference it made to my setup integrating subs:
Listening Results

Wow, I shouldn’t have waited so long to add subs to my setup. The added weight in the bottom octave really compliments the double 15” impact, giving it the full club or concert sound I have been looking for. I love live music and anything I can do in my home system to give me the feeling like being at the concert or club is all good to me.
As a side note on the pic above. For critical listening, I move the coffee table out of the way, I took this pic while I was supposed to be working. Since this pic, I installed quiet curtains behind the speakers covering the windows. They do a really good job in quieting my overly live room to fit the upper RT60 spec limit for the size of my room.
I must say I am surprised how much music material I listen to actually has output below 40 Hz – virtually everything I have has some content below 40 Hz. I can listen with just the subs turned on. I can see why the Rythmik L12’s are recommended by folks with planar or electrostatic speakers. To borrow an Austin Powers or Jake Peralta word, toit!!
Here is a small sample of music I use to evaluate audio systems and simply enjoy the music. This subgroup contains tunes that have reasonably good dynamic range. But before I do, please allow me to make a short comment on the state of the recording industry:

Michael Jackson – Thriller is #1 in worldwide sales, and still is today, along with AC/DC – Back in Black, #2 in worldwide sales. Both are DR 12. I want more of this dynamic sound and less of the hyper compressed music that makes up, unfortunately, the majority of my music collection.
While I get artistic intent, I feel the DR scales above fairly represent what is good and bad sound from a dynamic range perspective. See the bottom of the DR chart, where DR = punch and impact. Yah, more of that please. There is no excuse for overly compressed music today. It’s just wimpy loud sound.
If there is one thing we can collectively ask for as music consumers that would make the biggest impact on our sound reproduction systems is to allow the consumer to control the volume. Now back to our regular scheduled programming.

I could go on about each one, but I think I have gone on enough. Most were a new listening experience for me, discovering for the first time how much low frequency content was on each recording. If there is good low frequency content on the media, it is reproduced unlike what I have heard before from my system. Great fun.
Aside from a couple of later recordings, all of these recordings, mixes and masters are 16 years old or older. While my daughter bugs me that this is Dad music, it is sad to me that I have to go back 16 years or so to get a decently recorded, mixed and mastered rock album that has some dynamic range (check out the DR column in the playlist above). The more modern music I listen to on a regular basis, most unfortunately, is in the DR8 to DR6 range with too much dynamic range compression.
To be sure, my sub application is for music. However, the subs are fun with movies too. For example, the Jumanji remake with the drums and rhinoceros stampede shook my house so much my daughter came running out from her room wondering if there was an earthquake going on. Mission accomplished. However, these are light duty home theater subs, Rythmik has several larger subs designed for LFE HT applications. For music, I find these more than loud enough for my particular scenario.
Conclusion
While several audio DSP or DRC products can smooth the frequency response, Audiolense’s True Time Domain (TTD) correction is something to experience. Not only accurately and precisely time aligning drivers but also taking care of room reflections. I know of no other DSP on the market that can do this with this level of workflow automation. One can set up, take a measure, and be listening to a first good corrected response in under 30 minutes. Fine tuning after that is to one’s preference.
To me, accurate sound reproduction means the sound reproducing system (including room) is not altering the frequency or timing response arriving at my ears. Meaning a flat perceptual response within a ±3dB tolerance with no phase distortion or excess group delay. I want to hear the music arriving at my ears matching as closely as possible to the content on the recording.
Most loudspeakers are not time aligned and the timing response (i.e. delay and phase) gets worse when adding subs due to the long wavelengths involved. In addition, room reflections are inevitable due to the physical dimensions of our listening environments. While there are several subwoofer configurations that can help smooth out the bass, Audiolense DSP can pretty much smooth out the response. I show two subs integrating perfectly with my stereo mains and arguably achieving a smoother frequency response than adding more subs alone would do. Having time aligned subs with mains really shows off the transient impact of having the entire music wavefront arriving at ones ears at the same time. I can’t emphasize this point enough.
If you read JJ’s article linked earlier on, one can learn why we hear what we hear in small room acoustics. Audiolense takes advantage of this knowledge and programs the ability to control these parameters in a software DSP program. Includes user adjustable algorithms like frequency dependent windowing, which based on JJ’s research shows that the spectral balance (i.e. timbre) our ears care about is a blend of room interaction at low frequencies, and mostly direct sound in the mids and top end.
Later arriving reflections have an influence on the perceived frequency response, and sometimes quite substantially. Therefore, a more psycho-acoustically correct frequency smoothing technique is used in combination. As a result, this is what Audiolense sees and corrects in the frequency domain. A frequency smoothing based on psycho-acoustic principles leads to a smoothed response that sits high in the comb filter region and avoids overcorrection of dips.
These two psychoacoustic features are just the beginning of this very sophisticated and powerful audio DSP software program. At 64 bits of resolution, the calculations and FIR filter adds no distortion of any kind when convolved with the music signal.
If you are going the whole nine yards with digital XO everything with True Time Domain correction, Audiolense has automated most of the workflow. Once the XO’s are designed and satisfactory, then the workflow is basically the same as if one is working with a passive loudspeaker. It is quite the time saver.
I can recommend Rythmik subs and Audiolense to anyone looking to get the most out of their two channel or multichannel system. While I have been into DSP for quite a while, I should not have waited so long on adding subs. Using Audiolense, the subs integrate seamlessly with my mains as evidenced by the simulations and verification measurements – and my ears! Those subs are low frequency canons and really add weight below 40 Hz to give a deeper, but “toit” concussive sound quality. Those are Rythmik’s entry level subs. I am really impressed.
If you can achieve objective measurements similar to what I have shown in this article, I don’t think you would be disappointed with the sound quality. You may find correcting the bass in room is all the partial correction one needs, if the loudspeaker exhibits really smooth on and off-axis mid and high frequency response. The time domain correction can also be independently set for whatever frequency. It can be set to the same frequency as the partial correction above. This will correct the low end in the time domain, like the two examples of reducing group delay in the previous article and controlling reflections in this article. Or you may choose to apply an overall time domain correction, if you can always hear the tweeter arriving first, but just a partial frequency correction to correct below 500 Hz. Experimentation is encouraged.
Two other Audiolense features to be reviewed in a future article are user defined, mixed phase target design and multi-seat correction. For the latter, some folks feel is perceptually better than a single point measurement used for correction. Let’s see if that is true or not. Until then, enjoy the music!
Note: Mitch Barnett's previous article titled "Audiolense Digital Loudspeaker and Room Correction Software Walkthrough" can be found via the link below.

I wrote this book to provide the audio enthusiast with an easy-to-follow step-by-step guide for designing a custom digital filter that corrects the frequency and timing response of your loudspeakers in your listening environment, so that the music arriving at your ears matches as closely as possible to the content on the recording. Accurate Sound Reproduction using DSP. Click on Look Inside to review the table of contents and read the first few chapters for free.
Mitch “Mitchco” Barnett.
 I love music and audio. I grew up with music around me, as my mom was a piano player (swing) and my dad was an audiophile (jazz). My hobby is building speakers, amps, preamps, etc., and I still DIY today.
I love music and audio. I grew up with music around me, as my mom was a piano player (swing) and my dad was an audiophile (jazz). My hobby is building speakers, amps, preamps, etc., and I still DIY today.
I mixed live sound for a variety of bands, which led to an opportunity to work full-time in a 24-track recording studio. Over 10 years, I recorded, mixed, and sometimes produced over 30 albums, plus numerous audio for video post productions in several recording studios in Western Canada.





Recommended Comments
Create an account or sign in to comment
You need to be a member in order to leave a comment
Create an account
Sign up for a new account in our community. It's easy!
Register a new accountSign in
Already have an account? Sign in here.
Sign In Now